
電子回路って目に見えないのでイメージできなくて良くわからないって思いませんか?
かく言う私もそうでした。もともと大学時代は機械を専攻していたので回路はからっきし。でも、社会人1年目で最初に担当させられたのは回路設計でした・・・でもイメージできないので本当に苦労しました。そこで電子の流れを水に例えると理解しやすかったんです。文系出身の元営業にもダムや水門とかで説明すると「そう言うことか〜」と理解してくれました。今回ターゲットは小学生でも回路を理解してもらえるように考えてみましたので、ぜひ読んでみてください。
電子回路は「水のうごき」で考えるとスッキリわかる!
電気は目に見えないため、頭の中でイメージするのがとても難しいですよね。しかし、電気の性質は「水の流れ」に例えると、驚くほどスッキリと理解できます。
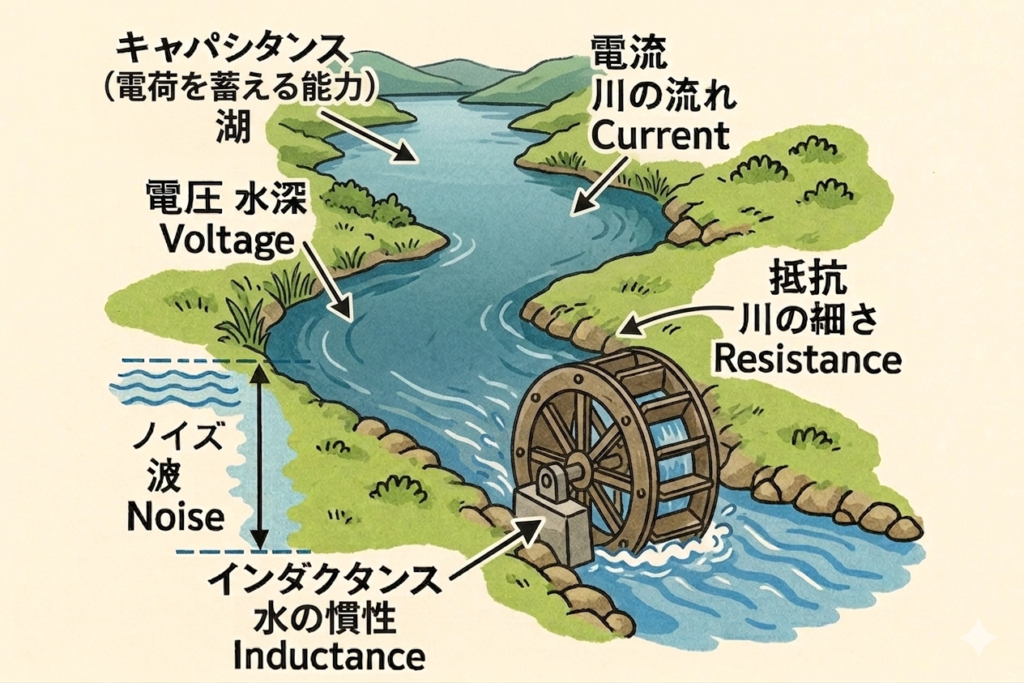
- 電圧(V:ボルト)= 水圧(高さ)
- 水を押し出す力です。ダムの高さが高いほど、勢いよく水が流れるのと同じように、電圧が高いほど電気を押し出す力が強くなります。
- 電流(A:アンペア)= 水流の量
- 1秒間に流れる水の量です。川を流れる水量が多いほど、強いエネルギーを持ちます。
- 抵抗(Ω:オーム)= 砂水路(川の細さや障害物)
- 水の流れを邪魔するものです。細い水路や砂利道を通ると水流が弱まるように、抵抗が大きいほど電流は流れにくくなります。
- コンデンサ(F:ファラド)= 貯水池
- 一時的に水を蓄える池です。水がいっぱいになると流れが止まり、逆に水が減ると放水して流れを助けます。
- インダクタ/コイル(H:ヘンリー)= 重い水車
- 急な水の変化を嫌う重い水車です。水を流し始めるときは重くて回りにくいですが、一度回り始めると水が止まっても惰性で水を押し流そうとします。
- ダイオード = 滝(一方通行)
- 水は上から下へは流れますが、下から上へは逆流できません。電気を一方通行にするのがダイオードです。
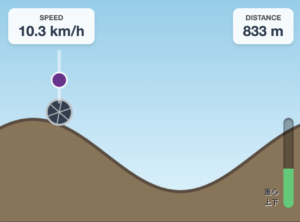
直感的に遊べる!「すいろ(水流回路)シミュレーター」の使い方
論理より実践!ということで、ブラウザ上でブロックを置くだけで電子回路を実験できるシミュレーター すいろ をご用意しました。
【遊び方のステップ】
- パーツを選ぶ: 左側のメニューから、置きたいパーツ(川やダムなど)を選びます。
- 配置する: マス目をタップ(クリック)してパーツを置きます。同じ場所をダブルタップするとパーツが回転します。
- スタート!: 左下の「▶スタート」を押すと、電気が水となって流れ出します!
- オシロスコープで観察: パーツを長押しすると、そのパーツにかかっている電圧(水圧)や電流(水量)の波形をグラフで観察できます。
まずは「ダム(電源)」から「海(GND)」へ、川を繋いで水を流してみましょう!
理解を深める!シミュレーターで遊ぶ時の注意点とコツ
シミュレーターで遊びながら学ぶための、ちょっとしたコツをご紹介します。実際の電子工作でも役立つ知識です。
1. 「大電流」に注意!大洪水で被害甚大
ダム(電池の+)と海(電池のー)を「川(ただの導線)」だけで直接繋ぐと、一瞬で水が流れ込み、とんでもない大電流が発生します。言ってみれば大雨の日の大洪水。川を飛び出し氾濫します。
現実の世界でこれをやると、発熱して火傷をしたり、部品が焼き切れたり、火花が散ったり部品が壊れたりします。
シミュレーター内には安全のための「10Aのリミッター(過電流保護回路)」が組み込まれているので壊れませんが、本来は間に「抵抗(砂水路)」を挟むのが正しい回路設計です。
2. LEDが光らない?「Vf(順方向電圧降下)」の秘密
LEDのパーツを置いても、設定によっては光らないことがあります。これはLEDには「最低限これだけの電圧(水圧)がないと電気が通らない」という壁(Vf)が存在するからです。プロパティ画面でVfの値を少し下げたり、電源の電圧を上げたりして、光り始めるポイントを探ってみてください。

3. スピーカーから音を鳴らしてみよう
「人PWM」というパーツを使ってスピーカーに水を流し込んでみてください。PWMの「周波数(Hz)」を変えると、水流が細かくON/OFFを繰り返し、スピーカーから出る音程が変わります。電気が波になって音に変わる瞬間を体験できますよ!

| 音階 | 周波数(Hz) |
|---|---|
| ド | 262 |
| レ | 294 |
| ミ | 330 |
| ファ | 349 |
| ソ | 392 |
| ラ | 440 |
| シ | 494 |
| ド | 523 |
まとめ:難しい計算は機械に任せて、作る楽しさを味わおう
電子回路と聞くとハードルが高く感じますが、「水」に置き換えてシミュレーションしてみると、まるで水遊びのように楽しむことができます。
子供と一緒に、ぜひ色々な回路を組んで実験してみてください。直感で「あ、こういうことか!」と閃いた瞬間から、電子工作の世界がもっともっと楽しくなるはずです!
ただ、このシミュレーターでは電気の流れをイメージできるようになるもので、抵抗、コンデンサ、コイルの計算も正しくされますが、実際このシミュレータで作ったものでそのまま電子工作ができるかというと答えはNOです。
このような理想のLEDやブザーはなく、それぞれ部品にはデータシートがあるので、必要なパラメーターを読み解かないといけなかったりします。
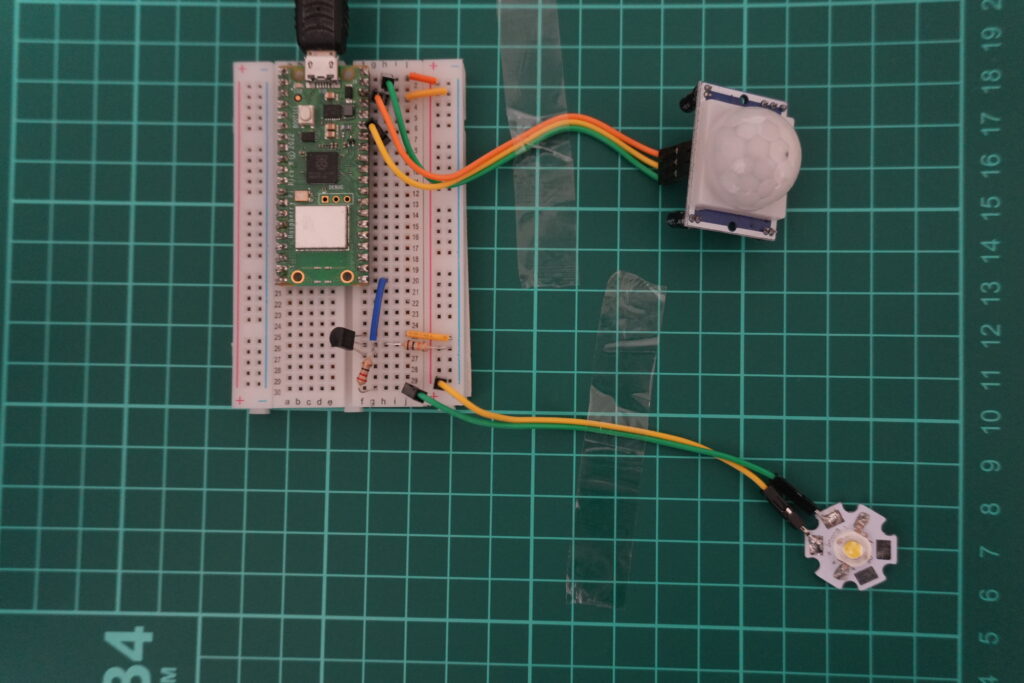
このシミュレーターで電気の流れがイメージできたら次は本物の電子工作で実践編してみませんか?
こちらに、そのまま真似すれば動くものを記事にしています。夏休みの工作にぜひ!

【マニアック解説】各パーツの背後にあるガチな計算式
「水流モデルでイメージは湧いたけど、実際の設計ではどう計算しているの?」と疑問に思う方もいるかもしれません。実は、シミュレーターの裏側では以下のような物理学の微分方程式が毎秒計算されています。(高校物理で習う内容です)
抵抗の計算(オームの法則)基本中の基本です。電圧 V、電流 I、抵抗 R の関係です。
コンデンサの計算コンデンサに流れる電流は、電圧の変化率(微分)に比例します。
インダクタ(コイル)の計算コイルに発生する電圧は、電流の変化率に比例して逆向きに発生します(逆起電力)。
……いかがでしょうか?数式を見ただけで、あーもういいやと思うお父さんもいるのでは?(笑)
面倒な計算はすべて「シミュレーター」が裏側でやってくれますが、より深く電子回路を理解したい方のためにこちらを用意しています。これは数式が出てきますので、覚悟してお進みください。
この読者は他の記事も読まれています