
このページでわかること。
- 回路の動作原理
- 応用回路の数式の見方と意味
- 応用回路をエクセルで計算する方法
電子回路の基本
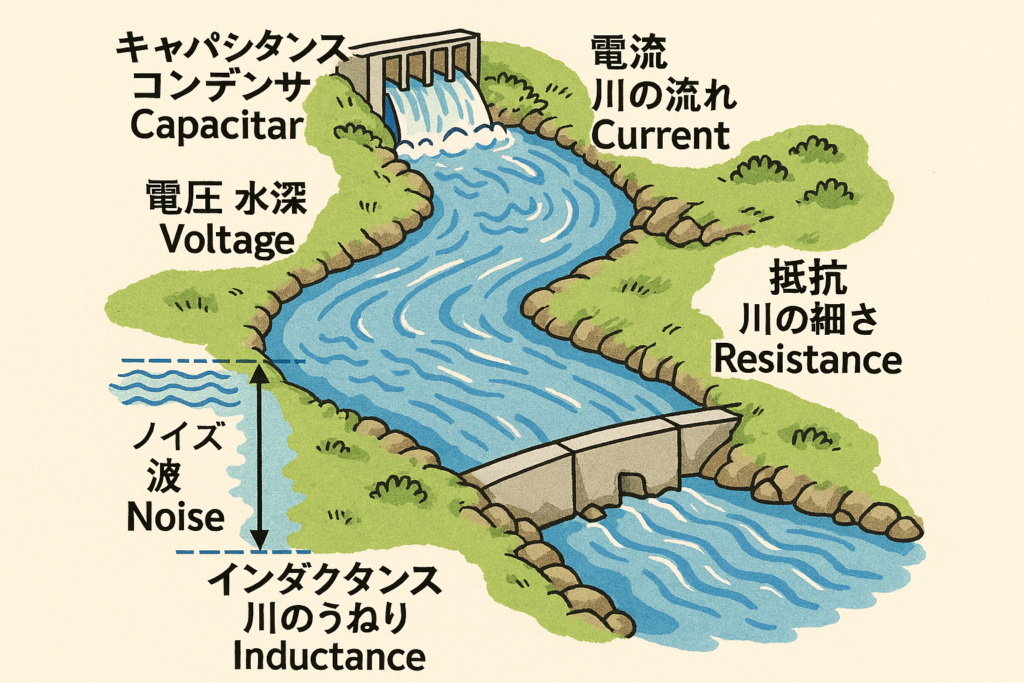
ここだけは理解しておかないと、電子回路の話はさっぱり理解できなくなるのでになるので述べておきます。私は文系の人に電気についていつも水や川の流れで説明します。水圧(電圧)とかダム(コンデンサ)と表現するとイメージで理解してもらえます。
回路の基本1 オームの法則
電圧と抵抗と電流の関係を表しています。私は僕(V)はI(I)でアール(R)と覚えました。
電圧V=電流I×抵抗R
回路の基本2 キルヒホッフの法則
川の水が枝分かれしても量が変わらないのと同じで電流も枝分かれしても電流の総和は変わりません。
電流I=電流I1+電流I2
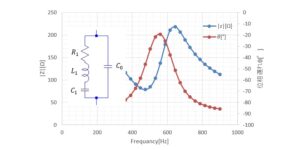
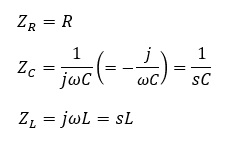
回路の基本3 インピーダンス
電圧が時間と共に変化するといった場合に使います。
周波数が絡んでくると抵抗・コンデンサー、コイルのことをインピーダンスという名前で扱います。
インピーダンスで表すと、抵抗はZR、コンデンサZC、コイルZLとすると以下の様に置き変えられます。でも計算は僕(V)はI(I)でアール(Z) ※RがZに変わっただけです。
ωは角周波数[rad/sec]、jは虚数。これはこういうもんだと覚えておいてもらえればと思います。
ただ、虚数jがあると実際にはどうしたら?と思う人も多いと思います。ミドルの趣味では虚数が無いように処理して計算させています。
周波数とノイズの抑制
アナログセンサーを使おうとすると必ず必要になる増幅とノイズカット。センサーの出力自体は小さいので100倍や1000倍と増幅して使用します。その時、ノイズも同じように増幅されてしまいます。ノイズというのは大抵センサー出力と違う周波数なのでセンサーの出力のみを取り出せるようにフィルター回路も使用します。
周波数と増幅率Gainと位相遅れθ
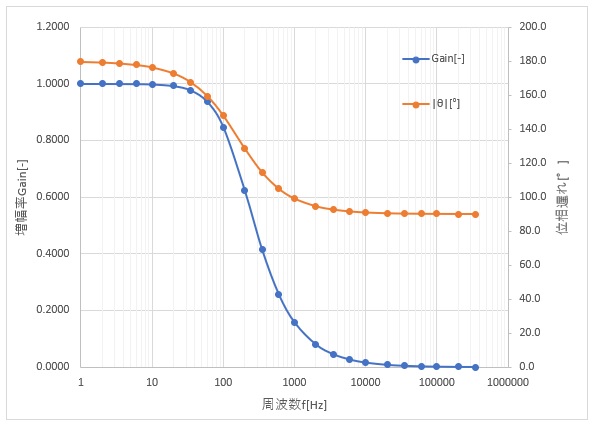
増幅率は振幅がどれだけされるかとなります。あくまで振幅です。入力×増幅率=出力となります。普通はdBで表示されますが、dBだと分かりにくいのでこのサイトではdB表記していません。dBにするときは、20LN(出力/入力)としてください。
位相遅れは、Sin波の周波数のずれと思っておいていただければと思います。
例えば、上の図で10000Hzのときを実際にオシロスコープなどで測定すると、振幅はほぼゼロと位相がほぼ90°ずれています入力のSin波に対して出力のSin波が小さく、90°ずれて観測されます。
代表的なパッシブフィルター回路の増幅率Gainと位相遅れθ
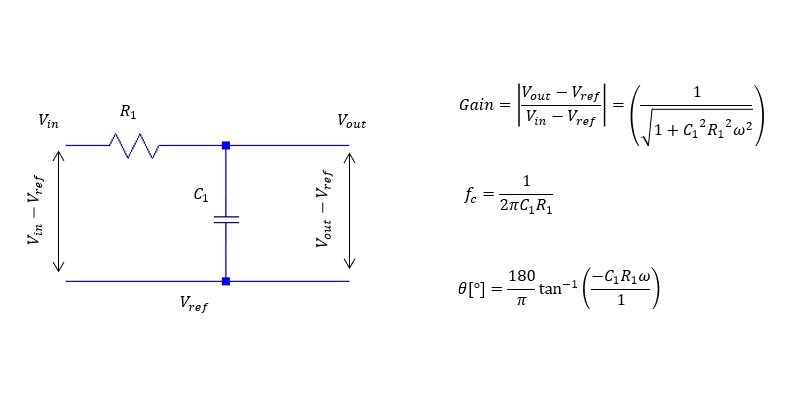
- RC 1次ローパスフィルター
-
ローパスなのでfcよりも低い周波数を通したいときに使います。
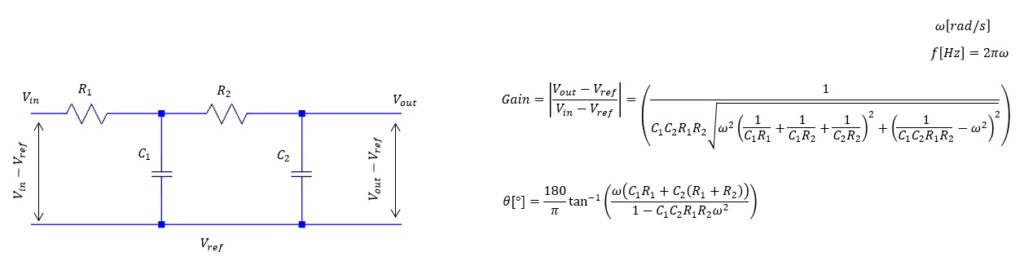
- RC 2次ローパスフィルタ
-
ローパスなのでfcよりも低い周波数を通したいときに使います。ただ2次になると、よりノイズの低減効果が高くなります。
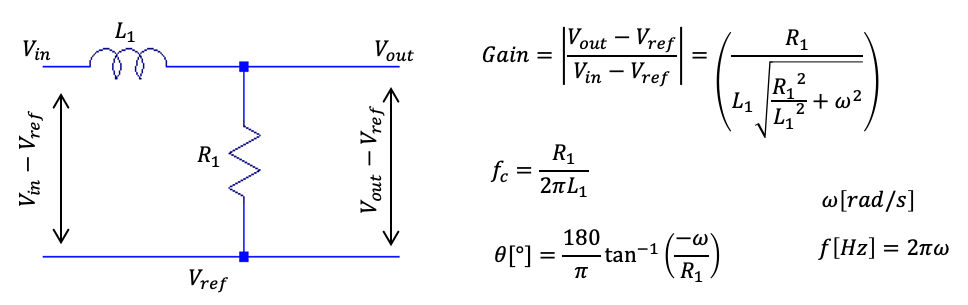
- LR ローパスフィルター
-
コイルLと抵抗Rで作るローパスフィルターです。電流が流れる経路に抵抗がないので電圧ドロップが少ないのが特徴です。Lはばらつきも大きいのでちょっと気をつけたい部品です。
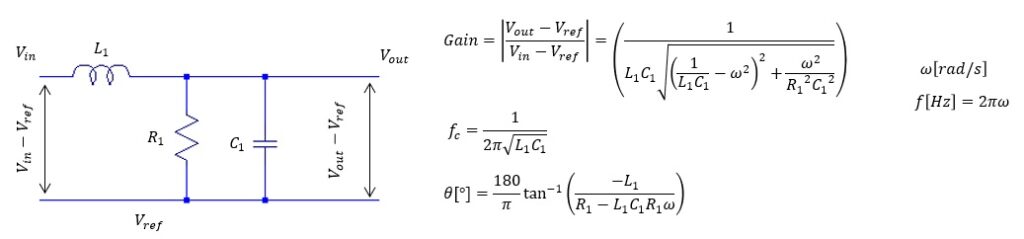
- LRC ローパスフィルター
-
コイルLとコンデンサーCでカットオフ周波数fcが決めれます。市販のもので常数の合わない場合に使います。
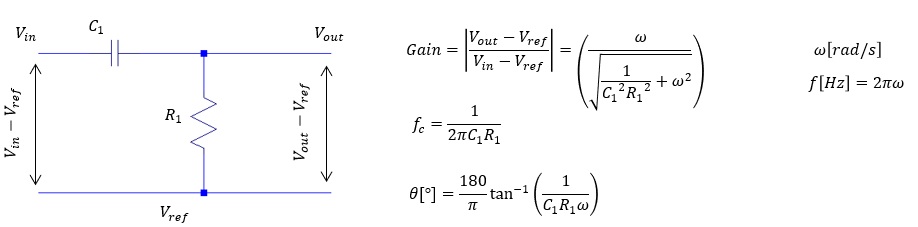
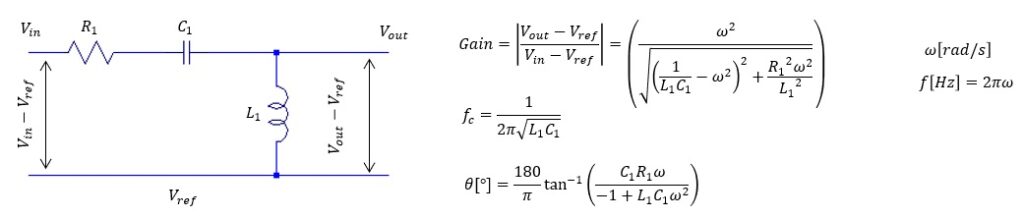
- RC ハイパスフィルター
-
ハイパスはカットオフ周波数fcよりも高い周波数を通すフィルターになります。低い周波数のノイズをカットしたいときに使いますが、世の中には電波が飛び交っていますので、ローパスフィルターとセットで使います。
- RC 2次ハイパスフィルター
-

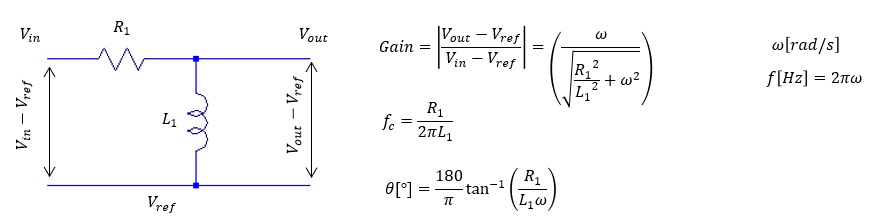
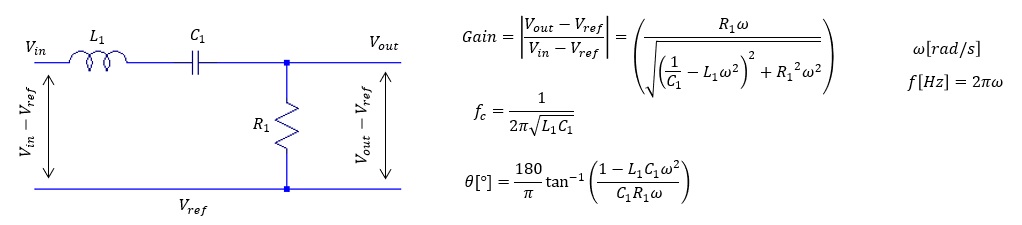
- LR ハイパスフィルター
-
- RLC ハイパスフィルター
-
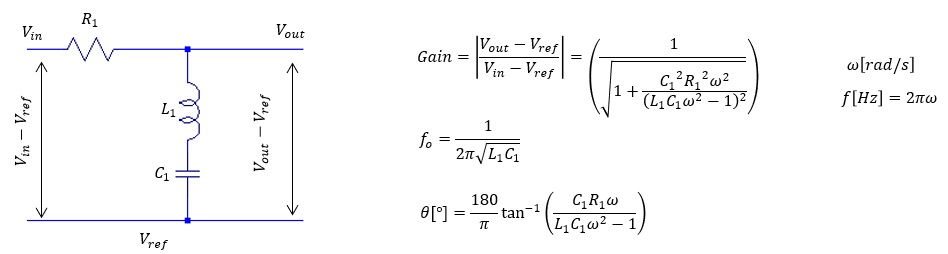
- RLC バンドパスフィルター
-
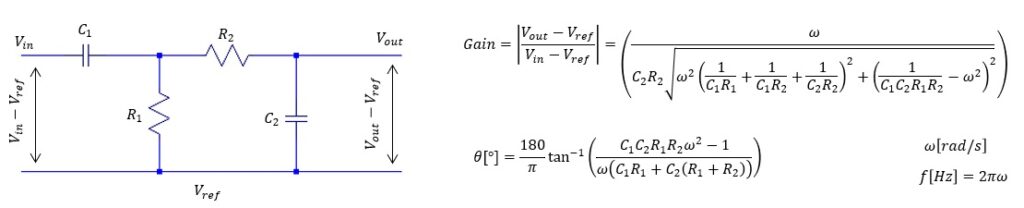
- CRRC バンドパスフィルター
-
バンドパスフィルターは特定の周波数のみを通すフィルターです。この周波数だけ通したいというときに使います。フィルターの強さは1次のフィルターと同じです。
- RLC バンドエリミネーションフィルター
-
バンドエリミネーションフィルターはバンドパスの反対で、特定の周波数のみを通したくないときに使うフィルターです。フィルターの強さは1次のフィルターと同じです。
オペアンプを使ったアクティブフィルター
オペアンプの計算のポイント
オペアンプはなんか良くわからないという人が多いと思います。じつは、計算をするとき2つのポイントだけ理解していれば簡単に扱えます。
オペアンプのフィルター計算のポイント
- +とーの入力端子の電圧は同じ ※(出力端子とーの入力端子が電気的につながってるとき)
- 入力端子には電流は流れない
この読者は他の記事も読まれています